Российские программисты научили роботов не сбиваться с пути
Новая технология позволяет роботам четко следовать заданному пути, экономя энергию и улучшая производительность
Ученые Московского физико-технического института разработали систему, которая учит роботов двигаться точно по заданной траектории, не сбиваясь с пути. Это достижение открывает новые возможности для создания маневренных автономных устройств, способных работать на производстве, в логистике и в быту.
Основная проблема современной робототехники – разрыв между виртуальными моделями и реальными машинами. Алгоритмы часто тренируются в идеальных цифровых средах, но при переносе на физического робота его движения становятся неточными из-за таких факторов, как трение в суставах и разный вес деталей. Разработка российских ученых устраняет этот разрыв.
Суть уникальной разработки заключается в создании самонастраивающейся виртуальной копии робота. Специальный симулятор на базе платформы MuJoCo-XLA автоматически подбирает параметры цифрового двойника – массу, инерцию и трение, – чтобы его поведение в точности совпадало с поведением реального аппарата.
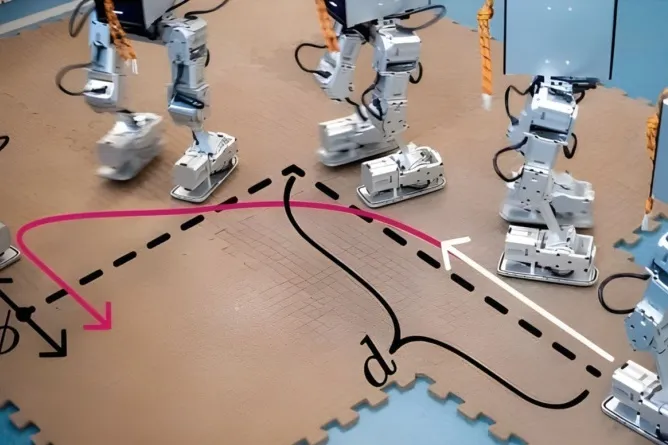
Испытания на двуногом роботе Mini π
Эффективность метода подтвердили испытания на двуногом роботе Mini π. По сравнению со стандартными методами обучения, новая система на 75% уменьшила отклонение от заданной траектории и на 46% увеличила расстояние, которое робот смог пройти в нужном направлении.
Теперь более точные и устойчивые роботы смогут эффективнее работать на сборочных линиях, выполнять задачи на складах в качестве автономных курьеров или служить надежными помощниками в быту. Кроме того, система учитывает сложные физические эффекты, такие как трение в механизмах, что не только повышает точность, но и позволяет роботам экономить энергию, которую они ранее тратили на коррекцию ошибок и неустойчивое движение.