Российский студент создал программу для роботов-манипуляторов

Разработка применима в сортировке мусора, логистических центрах и в промышленности
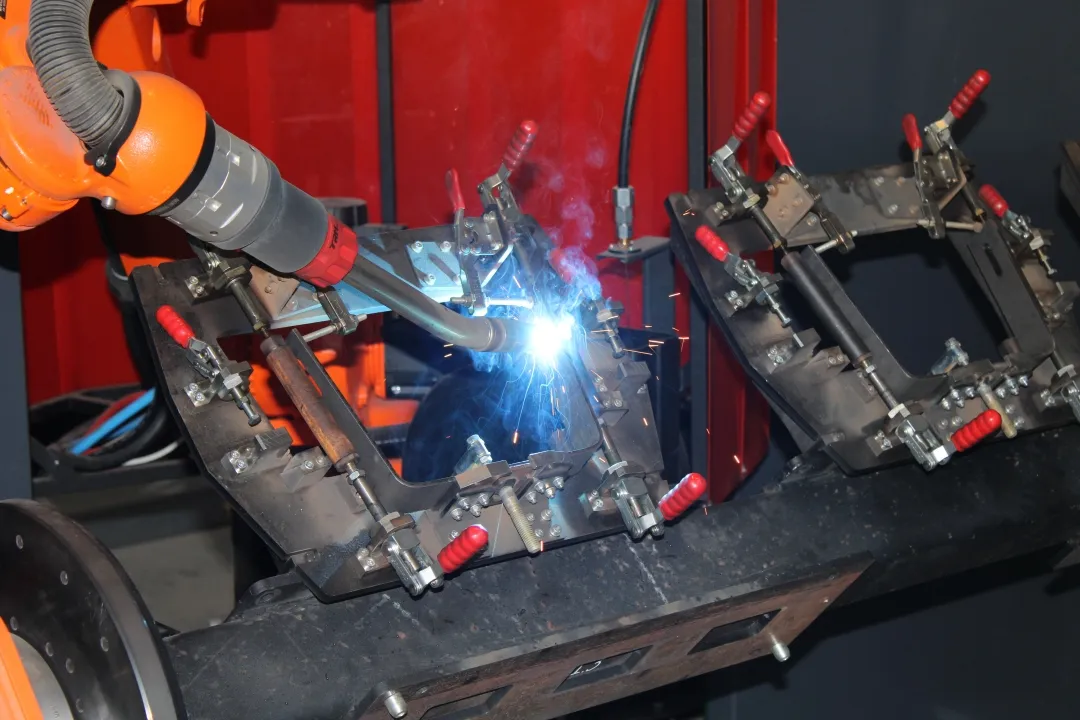
Студент Челябинского государственного университета Глеб Богданов разработал программное обеспечение для робота-манипулятора, оснастив его компьютерным зрением. Теперь роботы могут разделять объекты без управления и вмешательства, а значит, готовы заменить людей на такой трудной и малоприятной работе, как сортировка мусора. Помимо этого, они применимы в производстве, логистике, на маркетплейсах и в самых разных направлениях промышленности, где применимы умные манипуляторы.
Глеб Богданов оснастил робота способностью считывать ArUco-маркеры. По его системе машина с помощью таких маркеров определяет положение объекта и перемещает в заданную точку. Студент, презентуя разработку, показал, как робот успешно рассортировал четыре цветных кубика. При этом удивила не только точность, но и скорость, с которой манипулятор справился с задачей.
Разработка имеет большое будущее, а создатель планирует её совершенствовать, проведя оптимизацию нагрузки и улучшив распознавание маркеров.