Russian Scientists Present Stereo Vision Technology for Robots
Un-ViTAStereo estimates object distance accurately without costly hardware
Researchers at MIPT, working as part of an international team, have developed a stereo vision technology for robots that enables 3D perception without blind spots, according to the university’s press service. The system remains accurate even in fog, dense foliage, or in front of smooth surfaces, and can be used in industrial settings and autonomous vehicles.
The researchers explained that robots estimate distance in much the same way humans do. A camera acts as the eye, while algorithms function as the brain, calculating how far away objects are. However, robots struggle when faced with uniform surfaces like blank walls or repeating patterns.
Guidance for Neural Networks
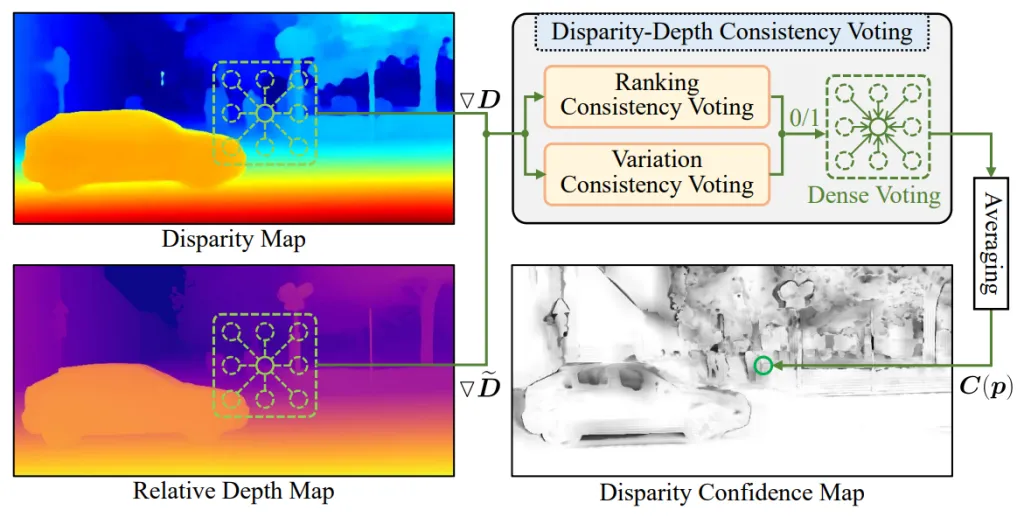
The new training framework addresses this limitation by acting as a kind of instructor that can estimate relative depth from a single image. The model Depth Anything V2 detects shadows, perspective, and object overlap, providing guidance signals that help train the stereo system and improve its accuracy.
The system operates in three stages: it evaluates each pixel against the guidance signals, sets boundaries based on predefined “anchor points,” and adjusts them accordingly. Finally, a disparity smoothing loss function called DDS helps reconstruct object contours. Early testing has already shown strong results.
Researchers plan to train Un-ViTAStereo for different environments, including urban and industrial settings.