Russian Engineers Teach Robots How to Stay on Track
A new control system developed at Moscow’s top tech institute helps robots move precisely along a set path—saving energy and improving performance across manufacturing, logistics, and everyday applications.
Researchers at the Moscow Institute of Physics and Technology (MIPT) have created a system that allows robots to follow a defined trajectory with exceptional accuracy. The technology bridges one of robotics’ biggest gaps—the mismatch between virtual training environments and the messy realities of the physical world—by teaching machines to adjust their own models as they move.
Today’s robotic algorithms are often trained in idealized digital simulations, but when transferred to real hardware, small differences—such as joint friction or uneven component weight—throw off movement accuracy. The MIPT team’s innovation eliminates this gap through a self-calibrating digital twin, a virtual replica that continuously adapts to match the robot’s real-world behavior.
Built on the MuJoCo-XLA simulation platform, the system automatically tunes key parameters—mass, inertia, and friction—until the virtual model perfectly mirrors the physical robot’s performance.
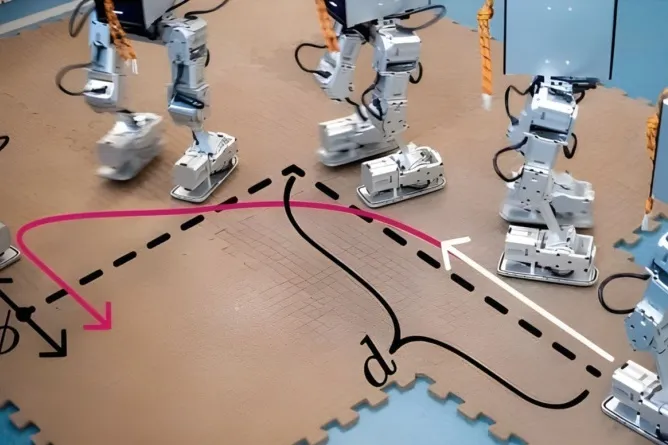
Tested on the Mini π Bipedal Robot
The system’s efficiency was confirmed in tests with a two-legged robot named Mini π. Compared to standard learning methods, the new approach reduced path deviation by 75% and increased the distance traveled in the intended direction by 46%.
The results could lead to more stable and efficient robots for use on assembly lines, in warehouses as autonomous couriers, or even as home assistants. By accurately modeling real-world physics—such as mechanical friction—the system not only improves motion precision but also cuts energy waste caused by constant course corrections and unstable movement.