Russian Scientists Build a Prototype Mobile Robotic Platform
The new system is designed to monitor industrial facilities and transport cargo across challenging surfaces, including water, sand, and snow.
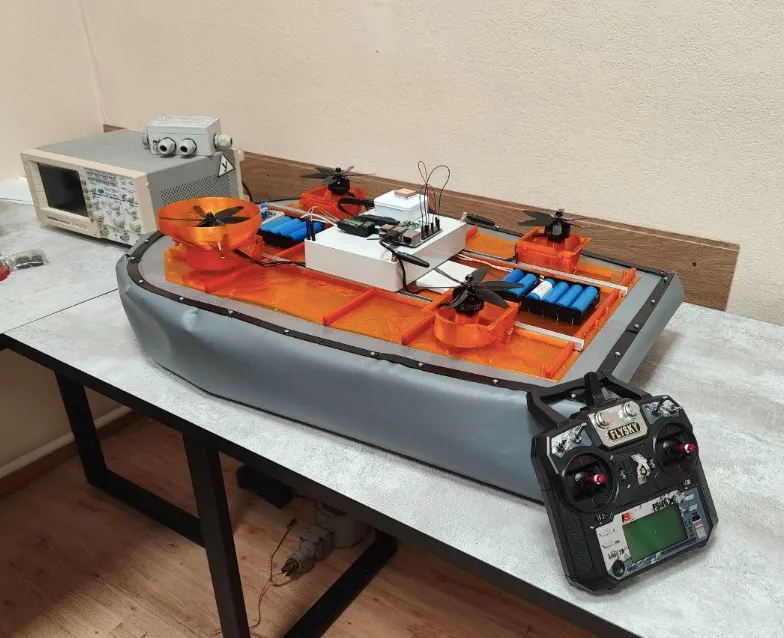
Researchers at the Ufa Interuniversity Campus have developed a prototype mobile robotic platform based on an air-cushion design for hard-to-reach terrain, according to the university’s press service.
The platform can operate for extended periods on virtually any flat surface, offers high maneuverability, and supports integration with data analysis systems.
The project is built on solutions developed by the Laboratory of Intelligent Software-and-Hardware Robotic Systems, established by scientists at Ufa State Petroleum Technological University together with the company Aviatech.
Expandable Functionality
According to project lead Andrey Krasnov, an associate professor at the Department of Automation, Telecommunications, and Metrology at USPTU, modern technologies make it possible to create a mobile autonomous air-cushion platform with expanded capabilities.
In particular, when combined with monitoring and data analysis systems, the platform could collect and process information on equipment conditions, environmental parameters, and other operational metrics.